Sistèm navèt 4D pou aplikasyon pou gwo chaj
Deskripsyon
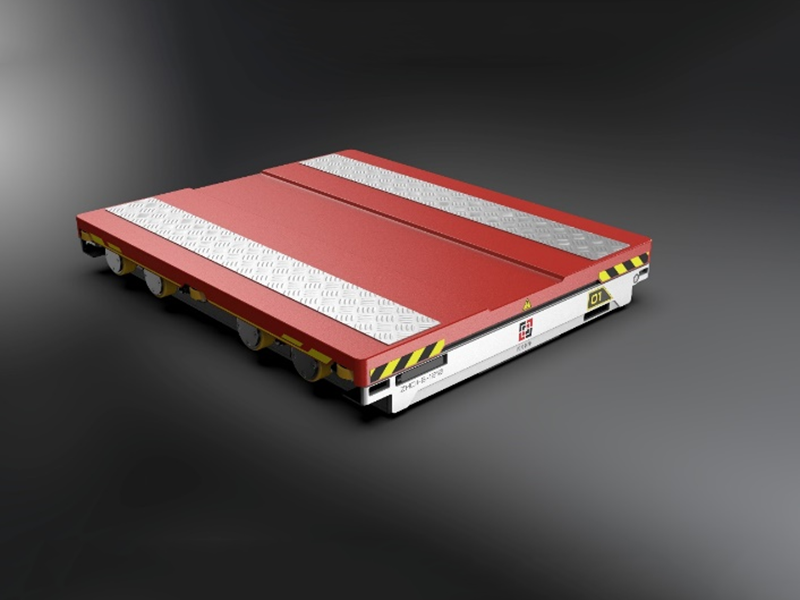
Kòm ekipman prensipal sistèm depo dans entelijan an, navèt 4D a konpoze sitou de yon konbinezon ankadreman, yon sistèm elektrik, yon sistèm ekipman pou pouvwa, yon sistèm kondwi, yon sistèm leve, yon sistèm detèktè, elatriye. Li gen senk mòd: kontwòl remote, manyèl, semi-otomatik, otomatik lokal ak otomatik sou entènèt. Li vini ak plizyè pwoteksyon sekirite ak avètisman sekirite, alam sekirite rejyonal, alam sekirite operasyonèl ak alam sekirite entèaktif. Bwat yo konekte pa soude pwoteksyon gaz ak boulon wo-fòs. Konbinezon etajè a adopte yon estrikti doub kouch. Aparans lan pentire ak espre, epi pati machin yo ak sipò elektrik yo galvanize. Li gen de seri sistèm kondwi ak de seri sistèm leve. Sistèm kondwi yo responsab direksyon XY yo. Youn nan sistèm leve yo responsab leve kago yo, epi lòt la responsab chanjman liy prensipal ak segondè a. Direksyon wotè Z a ka reyalize chanjman kouch navèt 4D a lè l sèvi avèk yon asansè Customized. Pou reyalize fonksyon aksè nan espas twa dimansyon an.
Estrikti kalite chay lou a fondamantalman menm jan ak vèsyon estanda a. Diferans prensipal la se ke kapasite chaj la amelyore anpil, epi kapasite pote a pral prèske de fwa pi gwo pase vèsyon estanda a. Konsepsyon mekanis leve a ki sipòte chay la ranfòse, epi puisans motè leve a ogmante pou asire ke kapasite pote chay la ka rive nan 2.5T. Puisans motè deplasman an rete menm jan an. Pou ogmante pwodiksyon an, rapò rediksyon an ogmante, epi vitès fonksyònman navèt 4D a ap diminye kòmsadwa.
biznis estanda
Asanblaj ak depo resi deyò depo a
Kouch chanjman relokasyon ak chaj envantè
Paramèt teknik
| pwojè | Done debaz yo | Remak | |
| modèl | SX-ZHC-T-1210-2T | ||
| Plato aplikab | Lajè: 1200mm Pwofondè: 1000mm | ||
| Chaj maksimòm | Maksimòm 2500kg | ||
| wotè/pwa | Wotè kò: 150mm, pwa navèt: 350KG | ||
| Mache nan direksyon prensipal X la | vitès | Maksimòm san chaj: 1.5 m/s, maksimòm chaj konplè: 1.0m/s | |
| akselerasyon mache | ≤ 1.0m/S2 | ||
| motè | Motè sèrvo san bwòs 48VDC 1 5 00W | Enpòte sèrvo | |
| Chofè sèvè | Chofè Servo san bwòs | Enpòte sèrvo | |
| Mache nan direksyon Y la | vitès | Maksimòm san chaj: 1.0m/s, maksimòm plen chaj: 0.8 m/s | |
| akselerasyon mache | ≤ 0.6m/S2 | ||
| motè | Motè sèrvo san bwòs 48VDC 15 00W | Enpòte sèrvo | |
| Chofè sèvè | Chofè Servo san bwòs | Enpòte sèrvo | |
| leve kago | Wotè leve | 30 milimèt _ | |
| motè | Motè san bwòs 48VDC 75 0W | Enpòte sèrvo | |
| leve prensipal | Wotè leve | 35 milimèt | |
| motè | Motè san bwòs 48VDC 75 0W | Enpòte sèrvo | |
| Chanèl prensipal/metòd pozisyonman | Pozisyonman apye: pozisyon kòd bar / pozisyon lazè | Almay P+F/SICK | |
| Chanèl segondè/metòd pozisyonman | Pozisyonman pou mache: fotoelektrik + enkodeur | Almay P+F/SICK | |
| Pozisyonman plato: lazè + fotoelektrik | Almay P+F/SICK | ||
| Sistèm Kontwòl | Kontwolè Pwogramasyon PLC S7-1200 | Almay SIEMENS | |
| kontwòl remote | Frekans travay 433MHZ, distans kominikasyon omwen 100 mèt | Enpòte pèsonalize | |
| Alimantasyon pouvwa | pil ityòm | Bon kalite domestik | |
| Paramèt batri | 48V, 30AH, tan itilizasyon ≥ 6h, tan chaje 3h, tan rechargeable: 1000 fwa | Kapasite a ka varye selon gwosè machin nan | |
| metòd kontwòl vitès | Kontwòl sèrvo, koupl konstan ki ba vitès | ||
| Metòd kontwòl ba kwaze | Planifikasyon WCS, kontwòl òdinatè tactile, kontwòl a distans | ||
| nivo bri fonksyònman | ≤60db | ||
| Kondisyon pou pentire | Konbinezon etajè (nwa), kouvèti anwo wouj, devan ak dèyè aliminyòm blan | ||
| tanperati anbyen | Tanperati: 0℃~50℃Imidite: 5% ~ 95% (pa gen kondansasyon) | ||


