-

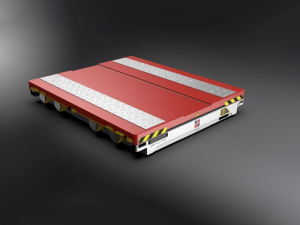
AMR
Trolley AMR a, se yon machin transpò ekipe ak aparèy gidans otomatik tankou elektwomayetik oswa optik, ki ka vwayaje sou chemen gidans ki preskri a, ki gen pwoteksyon sekirite ak divès fonksyon transfè. Nan aplikasyon endistriyèl, li se yon machin transpò ki pa bezwen yon chofè. Sous enèji li se yon batri rechargeable.
AMR sibmèje: yo fofile anba kamyon materyèl la, epi yo monte epi separe otomatikman pou reyalize operasyon livrezon materyèl ak resiklaj. Baze sou divès teknoloji pozisyonman ak navigasyon, machin transpò otomatik ki pa bezwen kondwi pa moun yo rele ansanm AMR.
-

Palettizè
Palètizatè a se pwodwi yon konbinezon òganik machin ak pwogram òdinatè, li amelyore efikasite pwodiksyon modèn. Machin palètizasyon yo lajman itilize nan endistri palètizasyon an. Robo palètizasyon yo ka ekonomize anpil pri travay ak espas planche.
Robo palètizasyon an fleksib, presi, rapid, efikas, ki estab e ki efikas.
Sistèm robo palètizasyon an itilize yon aparèy robo kowòdone, ki gen avantaj ke li piti anprint ak ti volim. Lide pou etabli yon liy asanblaj machin blòk konplètman otomatik ki efikas, efikas e ki ekonomize enèji ka reyalize.
-

Machin pliye plato
Machin pliye plato a se yon ekipman otomatik, yo rele li tou machin plato kòd, yo itilize li nan sistèm transpò plato, ansanm ak plizyè CONVEYOR, pou distribye plato vid yo nan liy transpò a. Machin pliye plato a itilize pou anpile palèt endividyèl nan anpile palèt, ki gen ladan: estrikti sipò anpile palèt, tab leve palèt, detèktè chaj, deteksyon pozisyon palèt, detèktè robo ouvèti/fèmen, leve, desann, switch pozisyon santral.
-

RGV
RGV vle di Rail Guide Vehicle, yo rele l tou yon chariot. Yo itilize RGV nan depo ki gen divès metòd depo ki gen gwo dansite, epi yo ka fèt koulwa yo selon nenpòt longè pou ogmante kapasite depo tout depo a. Anplis de sa, lè w ap travay, ou ka pwofite tou lefèt ke chariot élévateur a pa bezwen antre nan liy lan, ansanm ak mouvman rapid chariot la nan liy lan, li ka amelyore efikasite operasyonèl depo a epi fè li pi an sekirite.
-

Sistèm navèt 4D tip estanda
Kòm ekipman prensipal depo entansif entelijan kat-fason an, machin vètikal ak orizontal la konsiste sitou de asanble etajè, sistèm elektrik, sistèm ekipman pou pouvwa, sistèm kondwi, sistèm leve, sistèm detèktè, elatriye.
-

Sistèm navèt 4D pou tanperati ki ba
Estrikti vèsyon ba-tanperati travès la fondamantalman menm jan ak vèsyon estanda a. Diferans prensipal la chita nan diferan anviwònman operasyon yo. Vèsyon ba-tanperati travès la sitou itilize nan anviwònman -30 ℃, kidonk seleksyon materyèl entèn li trè diferan. Tout konpozan entèn yo gen rezistans tanperati ki ba, batri a se tou yon batri ba-tanperati ki gen gwo efikasite, ki ka sipòte chaj nan yon anviwònman -30 °C. Anplis de sa, sistèm kontwòl entèn lan te sele tou pou anpeche dlo kondanse lè antretyen an deyò depo a.
-

Sistèm navèt 4D pou aplikasyon gwo vitès
Mekanis vèsyon gwo vitès charyo vètikal ak orizontal la fondamantalman menm jan ak charyo vètikal ak orizontal òdinè yo, prensipal diferans lan se amelyorasyon vitès mach la. An konsiderasyon machandiz palèt yo relativman regilye ak estabil, pou amelyore efikasite jeneral pwojè a epi redwi kantite travès yo itilize, yo pwopoze yon vèsyon gwo vitès travès la. Endèks vitès mach la se de fwa pi gwo pase vèsyon estanda a, epi vitès leve machin nan rete menm jan. Pou amelyore sekirite, yo ekipe yon lazè sekirite sou ekipman an pou anpeche danje ki soti nan operasyon gwo vitès.
-
Sistèm navèt 4D pou aplikasyon pou gwo chaj
Mekanis travès lou a fondamantalman menm jan ak vèsyon estanda a, prensipal diferans lan se ke kapasite chaj li amelyore anpil. Kapasite chaj li a pral prèske de fwa pi gwo pase vèsyon estanda a, e kidonk, vitès kouri korespondan li a ap diminye tou. Ni vitès mache ni vitès leve ak leve ak leve ap diminye.
-

Etajè dans pou navèt 4D yo
Etajè depo entansif kat-fason an konpoze sitou ak moso etajè, travès sub-chanèl, ray sub-chanèl, aparèy baton lyezon orizontal, travès chanèl prensipal, ray chanèl prensipal, koneksyon etajè ak tè, pye reglabl, rale dèyè, filè pwoteksyon, nechèl antretyen, Materyèl prensipal etajè a se Q235/Q355, epi matyè premyè Baosteel ak Wuhan Iron and Steel yo chwazi epi fòme pa woule a frèt.
-

Sistèm leve gwo vitès
Asansè palèt resipwòk la konpoze sitou de pati prensipal yo tankou aparèy kondwi a, platfòm leve a, blòk balans kontrepwa a, ankadreman ekstèn lan, ak may ekstèn lan.
-
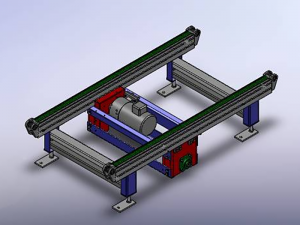
Sistèm transpò navèt enfòmasyon 4D
Motè a kondwi arbr kondwi a atravè gwoup transmisyon an, epi arbr kondwi a kondwi chèn transpò a pou reyalize fonksyon transpò palèt la.
-

Sistèm Kontwòl Depo WCS
Sistèm WCS la responsab pou planifikasyon ant sistèm nan ak ekipman an, epi li voye kòmandman sistèm WMS la bay chak ekipman pou operasyon kowòdone. Gen yon kominikasyon kontinyèl ant ekipman an ak sistèm WCS la. Lè ekipman an fini travay la, sistèm WCS la otomatikman fè afichman done ak sistèm WMS la.